Учени от Германия и Китай са разработили роботизирана "мишка" с гъвкав гръбначен стълб, способна да извършва странично огъване и да демонстрира повишена подвижност в сравнение с други съществуващи четирикраки роботи, съобщи Синхуа.
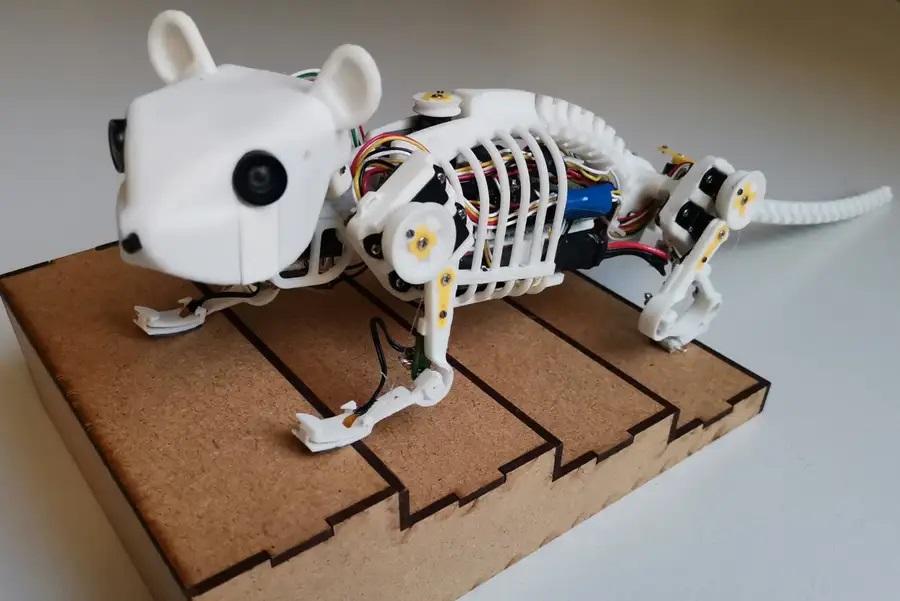
Изследването, описващо 40-сантиметровия робот, наречен NeRmo, който имитира морфологията и системата от сухожилия на истинска мишка, е публикувано в сп. Science Robotics.
Учените от Техническия университет в Мюнхен и университета "Сун Ятсен" са проектирали вдъхновения от мишка робот с изкуствени найлонови сухожилия, които поддържат гъвкаво и плавно движение, подобно на това на гръбначния стълб, пише БТА. Роботът NeRmo има твърда предна структура, която съдържа електрониката му. Гръбнакът, четирите стави и изкуствените сухожилия му позволяват да се движи по-скоро като мишка и да се обръща бързо.
ОЩЕ ОТ #мишка




Роботизираният "гризач" с тегло 225 грама разполага с 13 степени на свобода, позволяващи различни гъвкави движения.
Този дизайн значително подобрява способността му да завива и да се представя добре в тестове с лабиринт.
"Нашето изследване може да допринесе за по-доброто разбиране на базираните на гръбначния стълб умения за придвижване на четириноги и да доведе до обещаващи концепции за роботи с по-гъвкави крака", казват от екипа.






























